Device Workspace Transform Tutorial
Haptic simulations attempt to replicate the geometry of physical objects that can be large or small. Unity uses floating points in its internal calculations meaning that it is more efficient and more accurate to use a large scene, on the scale of metres, and scale Inverse3’s motion rather than scaling the scene down to Inverse3’s workspace. This tutorial builds on the Generating Basic Force-feedback tutorial to show how to scale motion and position the workspace of the Inverse3 in a scene.
Introduction
To scale Cursor movement, we will create a Haptic Workspace GameObject and place the Cursor sphere as its child. The Haptic Workspace translation also provides control over the position of the Inverse3 relative to the scene, meaning the Cursor motion can be moved to a different location without moving the scene.
Before starting, complete the Generating Basic Force-feedback
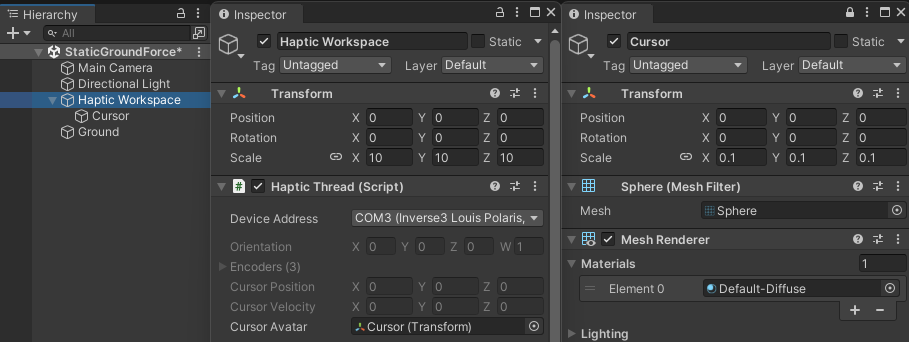
tutorial and open the project. Next, create an empty GameObject, name it Haptic Workspace, and
set its scale to (10, 10, 10). For this example, a scale of 10 will make a 1 m object in the scene
feel like it is only 10 cm, but you can set it to any positive number.
Haptic Workspace, also, allows you to position the device workspace relative to the scene by simply changing its position. In this example, you can move the workspace up and down.
In the hierarchy window, drag the Cursor object onto the Haptic Workspace to make it Haptic Workspace’s child.
Also, HapticThread and GroundForce scripts can be moved from the Haptic Thread GameObject to
the Haptic Workspace and Haptic Thread which is now empty and useless, can be deleted.
Now, open GroundForce.cs and add the following members:
private float m_workspaceScale;
private float m_workspaceHeight;
m_workspaceScale holds the scaling factors of the Haptic Workspace set in the previous step
while m_workspaceHeight represents the in scene position offset of the workspace on Y-axis. Next,
initialise the two variables in the Awake method by adding
m_workspaceScale = hapticThread.avatar.parent.lossyScale.y;
m_workspaceHeight = hapticThread.avatar.parent.position.y;
Now, update ForceCalculation such that it accounts for both position offset and the change of
scale when calculating contactPoint by replacing
var contactPoint = position.y - m_cursorRadius;
with,
var contactPoint = (position.y * m_workspaceScale) + m_workspaceHeight - m_cursorRadius;
Scaled motion will cause the forces to scale along with the scene. To avoid this, the force
calculations must eliminate position scaling by dividing by the scaling factor m_workspaceScale
such that
force.y = penetration * stiffness;
becomes,
force.y = (penetration / m_workspaceScale) * stiffness;
Notice, that
velocityis never scaled up or down.
When you enter play mode, you will notice that the Cursor motion will be more pronounced but the Cursor readings in the inspector window stay the same. You can also move the workspace using the position parameters of the Haptic Workspace.
Note that the haptic calculations will generate a force across the plane as if it was infinite, so moving the workspace sideways will only affect the visualisation.
Source files
The final scene and all associated files used by this example can be imported from the Basic Force Feedback and Workspace Control sample in Unity's package manager.
GroundForce.cs
using Haply.HardwareAPI.Unity;
using UnityEngine;
public class GroundForce : MonoBehaviour
{
[Range(0, 800)]
public float stiffness = 600f;
public Transform ground;
private float m_groundHeight;
private float m_cursorRadius;
// Cursor Offset
private float m_workspaceScale;
private float m_workspaceHeight;
private void Awake ()
{
var hapticThread = GetComponent<HapticThread>();
m_groundHeight = ground.transform.position.y;
m_cursorRadius = hapticThread.avatar.lossyScale.y / 2;
m_workspaceScale = hapticThread.avatar.parent.lossyScale.y;
m_workspaceHeight = hapticThread.avatar.parent.position.y;
hapticThread.onInitialized.AddListener(() => hapticThread.Run( ForceCalculation ));
}
private Vector3 ForceCalculation ( in Vector3 position, in Vector3 velocity )
{
var force = Vector3.zero;
// Contact point scaled by parent offset
var contactPoint = (position.y * m_workspaceScale) + m_workspaceHeight - m_cursorRadius;
var penetration = m_groundHeight - contactPoint;
if ( penetration > 0 )
{
force.y = (penetration / m_workspaceScale);;
force.y -= velocity.y * damping;
}
return force;
}
}